|
面向自动驾驶车路径导航构建车道级路阻函数 编者按:为宣贯招商局集团“科技引领、拥抱变化”的主题,营造良好的科技创新文化氛围,对标国内外优秀高速公路运营企业,招小畅将摘选交通及高速公路相关“科技创新、技术应用、管理领先”等题材的业内资讯与深度研究,供大家借鉴交流,开拓新的视野。 构建车道级路阻函数 路阻函数表征道路交通阻抗与交通负荷之间的关系,是城市交通分配和车辆路径导航的重要基础。目前广泛采用的路阻函数是美国公路局在1964年提出的BPR函数,描述路段行程时间与交通流量之间的关系。然而,现有路阻函数都是以路段为单位,没有考虑车道间交通差异,无法满足以自动驾驶车为代表的智能汽车对车道级路径导航的需求。 为此,本研究试图针对自动驾驶车在城市路网中的路径规划问题建立车道级路阻函数。首先,利用VISSIM进行多种场景仿真,发现自动车强制换道行为、车道交通状况与路段行驶效率存在明显关系;然后,综合仿真所得规律,交通流理论和换道模型,构建了强制换道决策(换道决策点与最大等待时间),车道交通参数(车道流量,限速等)和行驶效率(行程时间和换道成功率)之间的函数关系,即车道级路阻函数。结果表明,该函数有望应用于自动车路径导航当中。
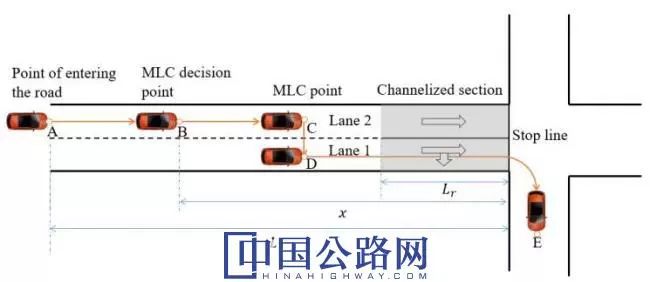
引言:自动驾驶与路径导航 当前,交通拥堵所引起的延误、事故和环境污染等各种问题成为严重制约城市发展的瓶颈。自动驾驶技术有望解决这些问题,被各国政府、企业和科研机构给予了很高期望。当自动车上路混行于城市路网普通车流中,面临一个重要问题就是,如何优化其路径行驶效率进而优化交通系统运行效率。车辆路径导航属于交通系统中的经典问题,其关键之一是表征道路交通阻抗与交通负荷关系的路阻函数,目前广泛采用的路阻函数是BPR函数,描述路段行程时间与交通流量之间的关系。 本文研究者认为,以路段为单位的路阻函数,不适用于自动车的路径导航,原因有三点:(1)不像人类驾驶员可以根据经验做路径规划,自动车没有路径导航将无法在路网中正常行驶;(2)车辆行驶路径最小单位是车道,进而自动车路径导航应该到车道级;(3)不同车道间交通状况(通行能力,限速,流量)都存在差异,忽略这些差异将导致规划路径失去最优性。因此,本研究试图针对自动驾驶车在城市路网中的路径规划问题建立车道级路阻函数。 车道级路阻函数的建模分析 作者前期研究表明,自动车强制换道行为是规划其路径的关键。一个典型场景为:如图1,自动车从车道2进入路段并希望在下游交叉口右转离开,那么自动车将在B点做强制换道决策并继续向前行驶寻找换道空挡,接下来有两种可能情形:(1)自动车在进入禁止换道区前完成换道;(2)自动车到达禁止换道区入口并停车等待,在最大等待时间内,换道空挡出现则换道,否则放弃换道继续直行。换道决策点与最大等待换道时间,直接影响自动车经过该路段的行程时间和换道成功率,是强制换道两大关键决策变量。因而,本研究认为,针对自动车的车道级路阻函数,就是要构建强制换道决策(换道决策点与最大等待换道时间),车道交通参数(车道流量,限速等)和行驶效率(行程时间和换道成功率)之间的函数关系。
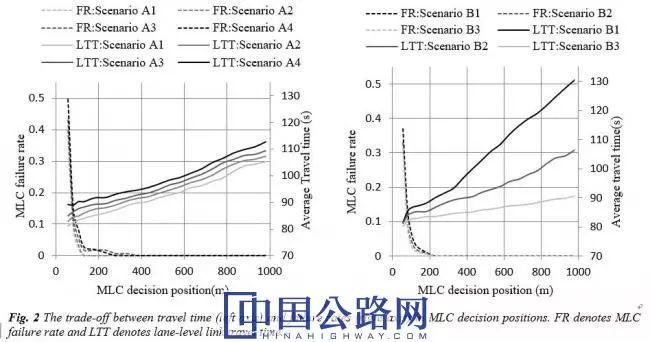
为研究这些变量之间的关系,本研究利用VISSIM进行了多场景仿真,主要发现有:(1)行程时间和换道失败率这两个目标存在矛盾,降低一个目标必然造成另一个目标增加,而换道决策点就是平衡二者的支点;(2)行程时间与换道决策点大致成线性关系,换道失败率与换道决策点成明显的负指数关系,并且这两种关系都会受到交通参数的影响 (如图2)。
建模方法 本研究主要建模思路为:(1)利用交通流理论和排队论,并结合换道特性,建立了行程时间关于换道决策与交通参数关系模型;(2)结合负指数分布模型和换道模型,建立了换道失败率与关于换道决策与交通参数关系模型;(3)对前面所建关系模型加入权重因子,构建形成车道级路阻函数。 重要结果
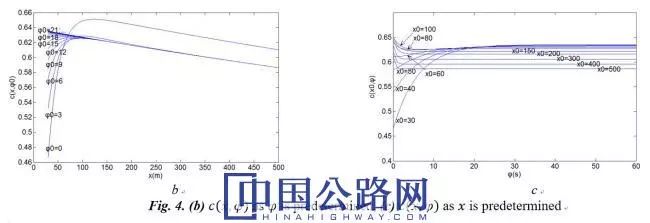
本研究结果部分重点研究了换道决策对自动车行驶效率(行驶时间和换道失败率)的影响。与期望一致,所提出模型可以计算出全局最优点(最优换道决策点和最大等待换道时间)。此外,所提模型还可以对两种现实情况给出最优决策建议:(1)如果自动驾驶系统预先设置了最大等待换道时间,所提模型可以计算此条件下自动车最佳换道决策点;(2)当自动车在某处(未必是最优点)已经做出换道决策,那么模型仍然可以得到在此条件下最大等待换道时间的最佳值。因而,本研究所提出车道级路阻函数有望应用于自动车路径导航当中。 ps:内容转载自中国公路网。文章版权归原作者所有,转载目的仅为传递行业信息,如有来源标注错误或涉及作品内容、版权和其他问题,请作者持权属证明在30日内与本号联系,我们将在第一时间更正、删除,谢谢。 |