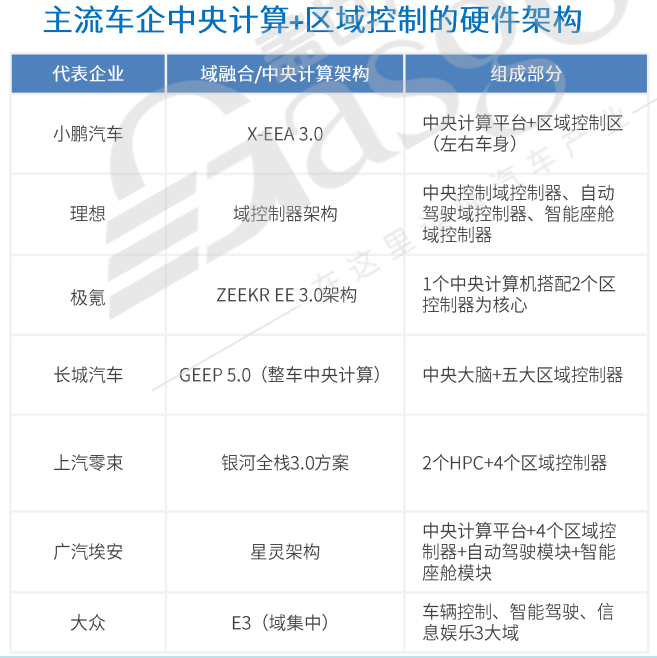
80年代有一部名为《霹雳游侠》的科幻电视剧,男主Michael Knight拥有一辆无与伦比的智能汽车——KITT,这款车拥有自我意识,能够像人类一样交流互动。 要实现这一功能,主要依靠其大脑——一块名为“奈特2000”的微型中央处理器,其运算速度为一秒十亿次,并且可以通过中控单元控制车身各部分。 显然,当时的创作者对算力发展的预测还是过于保守了,如今的汽车计算平台运算速度远超于KITT,但还不能实现类似其的智能化体验。饱含巧思的人们,将对未来智能汽车的畅想付诸于文字或荧屏,对于如何实现,似乎也在一定程度上指明了方向。 现实与科幻正在同一时空里交织,现实的智能汽车正朝KITT发展,最为类似的一点是汽车E/E架构,正向中央集中式架构演进。 走向中央计算 汽车智能化的发展伴随着汽车功能的大幅增加,智能座舱、智能驾驶重塑汽车体验,软件定义汽车成为行业共识,成为打造智能汽车的标尺所在。但这也意味着汽车对算力和控制等方面的要求会越来越高,整车E/E架构的升级迫在眉睫。 在传统的分布式架构中,功能系统的核心是ECU,汽车智能功能的升级主要依赖于ECU和传感器数量的累加。随着ECU的增加,车内的线束也会增多,对于控制整车成本和设计装配都是挑战。并且,各个ECU之间的计算能力无法协同,还会带来算力浪费的弊端。 更明显的弊端来自于供应链,因每个系统由不同的供应商提供,不同的ECU运行着不同的操作系统及应用软件,难以统一维护升级,对汽车开发测试、制造成本及售后维护也带来巨大压力。 在此境况下,域集中式电子电气架构以及更高阶的中央计算+区域控制架构应运而生。这是一个在发展中融合的过程,多个ECU逐渐合并成域控制器,域控制器继续融合,最终实现1个中央计算平台+N个区域控制器的终极布局。 谈及E/E架构的演变,绕不开特斯拉。2012年的Model S已出现功能域划分的概念,到2017年,特斯拉又在Model 3上进一步尝试了中央计算+区域控制器框架,出现中央计算雏形。 伴随国内智能电动车产业的飞速发展,自主品牌车企不甘人后,域控制器架构时代已加速到来,基于中央计算+区域控制的硬件架构也逐渐成为主流趋势,此趋势在本届上海车展上得到印证。小鹏、理想等新势力车企以及上汽、广汽等老牌车企均展示了自家的架构方案。 |