|
本文首发于微信公家号“RideIP玩转知识产权”(ID:RideIP0606) 跟着中国经济程度的不竭提高,越来越多的中国度庭已经拥有至少一辆汽车了。据公安部交管局统计,截止2019年6月,全国灵活车保有量达3.4亿辆,此中汽车2.5亿辆,中国已经成为名副其实的汽车大国。
在继承讨论汽车有关的话题之前,首先向列位读者提出一个糊口经验问题:你在日常行走中会遇到横风吗?此时你会怎么做? 同样的,汽车也会遇到横风,在大风天中驾驶汽车是很常见的,尤其是沿海地域履历过台风侵袭的老司机们。那么此时,为了包管汽车驾驶的平安,遇到横风(大风)你会怎么做呢? 1、现有的技能方案 车辆行驶进程中忽然遇到横风环境时,由于横风的作用,会致使车辆偏离行车标的目的。车速和车的横截面积必定的环境下,风力越大,车的跑偏现象越紧张,而且横风的作用是随车速的提高而加重。 对付横截面小、重心比力低的小汽车,受到横风的影响相对车型较大的车会小一点,但对面包车、大型客车、帆布篷车等箱形车的影响较大,因为这类车辆的整体重心较高,侧向面积较大。 在有人驾驶的环境下,遇到横风时,驾驶员凭据经验,一般会实时下降车速并紧握标的目的盘,实时修正车辆行驶标的目的,确保车辆平安渡过风区。 可是在无人驾驶环境下,行驶标的目的根本上是依据摄像头拍摄车道线,然后颠末图像辨认算法辨认车道线,采纳沿着车道线行驶的方法实现车道连结功能,这种方法不克不及有效解决横风对车辆行驶标的目的的突发影响。 也就是说,由于无人驾驶进程中失去了驾驶员这种富有经验和机动应变能力的校正器脚色,在遭遇大风作用于无人驾驶的智能汽车时,智能汽车无法很好地连结既定行驶标的目的,具备很大的平安风险。 解读:现有技能中主要是涉及到有人驾驶汽车的环境,当遭遇横风时候,驾驶员能够凭据本身的经验下降车速并实时调整驾驶标的目的,使得汽车能够平安渡过风区,下降横风对车的影响。可是无人驾驶时,智能汽车没有人脑这种活络的校正器,无法机动地应对横风这种环境,无法确保智能汽车平安渡过风区。 2、华为的解决方案 华为的一份名为“节制智能汽车行驶标的目的的方式和装置”专利(申请号:201710245501.X )提供了一种可行的解决方案,此专利于2017年4月14日申请,并于2018年11月2日公然,目前仍处于审查阶段。
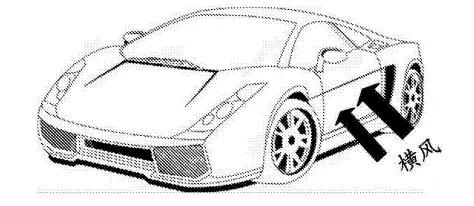
图1 图1示出了本申请实施例的一个应用场景,如图1所示,智能汽车在行驶的进程中,可能会忽然遇到横风,风速越大,横风对智能汽车施加的横向力越大,致使智能汽车的行驶标的目的变革越大,致使智能汽车偏离行车标的目的或者者失控,诱发车祸。
图2 图2示出了凭据本申请实施例的节制智能汽车行驶标的目的的方式。如图2所示,方式100包含: S110,确定智能汽车周围的风速和风向; 好比,智能汽车上安装有可以与道路景象站进行通信的通信单位,通信单位与道路景象站进行信息交互,获取道路景象站测得的风速和风向数据;或者者,智能汽车上安装有风速计,通过风速计丈量智能汽车周围的风速和风向。 S120,确定所述智能汽车的行驶标的目的相对付车道线的偏移值; 好比,智能汽车上安装有角速度计,比方,陀螺仪,通过角速度计丈量智能汽车在三个目标轴(X、Y和Z)向上的角速度,凭据测到的角速度通过量次积分均匀计较出智能汽车的行驶标的目的相对付车道线的偏移值。 S130,凭据所述风速、所述风向和所述偏移值,节制所述智能汽车的行驶标的目的。 好比,在凭据风速、风向和偏移值节制智能汽车的行驶标的目的时,先对智能汽车进行减速,并凭据风向和偏移值确定要对标的目的盘施加的节制力的标的目的和巨细,通过确定的节制力节制标的目的盘,实现对智能汽车的行驶标的目的的纠正。 举例来讲,假如智能汽车中预先配置有车速和风速品级的对应瓜葛: 车速小于60km/h ,汽车能够行驶在风速品级为8级或者8级以上的环境下; 车速小于80km/h且大于60km/h ,汽车能够行使在风速品级为6-7级的环境下; 车速小于100km/h且大于80km/h ,汽车能够行使在风速品级为4-5级的环境下; 车速小于120km/h且大100km/h ,汽车能够行使在风速品级为4级的环境下。 但若确定智能汽车周围的风速级别为6级,当前车速为100km/h,则能够节制智能汽车的车速减小至80km/h以下。或者者优选地,将智能汽车的车速减小至80km/h,这样能够使得智能汽车采纳最高的平安速度、最短的时间顺利通过横风地带。 而且能够理解的是,在对智能汽车的行驶标的目的进行节制的进程中,必要及时获取智能汽车周围的风速、风向和行驶标的目的相对付车道线的偏移值,实现对智能汽车的闭环节制,最终使得智能汽车顺利通过横风情况。
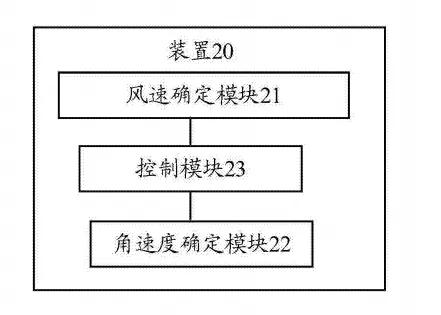
图3 图3示出了凭据本申请实施例的节制智能汽车行驶标的目的的装置。如图3所示,装置20包含: 风速确定模块21,用于确定智能汽车周围的风速和风向; 角速度确定模块22,用于确定所述智能汽车的行驶标的目的相对付车道线的偏移值; 节制模块23,用于凭据所述风速、所述风向和所述偏移值,节制所述智能汽车的行驶标的目的。 凭据本申请实施例的节制智能汽车行驶标的目的的装置,凭据风速、风向以及智能汽车的行驶标的目的相对付车道线的偏移值,节制智能汽车的行驶标的目的,可以防止车辆跑偏,加强智能汽车在恶劣天气下的节制不乱性,提高智能汽车的平安系数。 解读:无人驾驶的智能汽车能够获取汽车周围的风速、风向以及行驶标的目的相对付车道线的偏移值,从而模拟人脑这种活络的校正器,凭据上述值的瓜葛节制智能汽车的行驶标的目的和行驶速度,使其平安渡过风区。 总结:华为提出的发现技能方案,通过确定智能汽车周围的风速和风向以及行驶标的目的相对付车道线的偏移值,再综合斟酌所述风速、所述风向和所述偏移值,节制智能汽车的行驶标的目的,实现了对人脑节制汽车行驶的模拟,可以加强无人驾驶智能汽车在恶劣天气下的节制不乱性,提高智能汽车的平安系数。 提供全球最新技能参考,启迪立异思路!乘法君一直在努力,想领会更多国外最新专利技能,请连结存眷,很是感谢! 更多干货文章请存眷微信公家号“RideIP玩转知识产权”(ID:RideIP0606) |