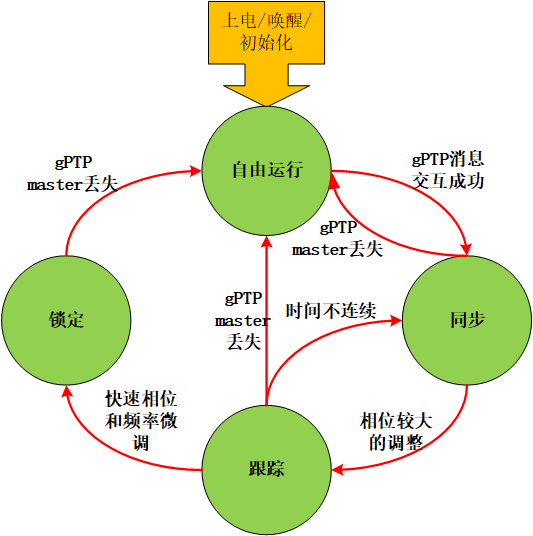
近年来,随着移动互联网和汽车电子设备的不断快速发展,以智能网联汽车为核心的下一代智能交通系统逐渐深入城市居民生活。在新技术、国家政策等因素的作用下,具备组合驾驶辅助功能汽车渗透率快速提升。伴随着车辆智能化、网联化的推进以及汽车的自动驾驶技术逐渐向前推进,如高级辅助驾驶、自动驾驶、智能座舱、域控制器以及车辆大数据采集等引发了车辆对总线带宽需求的爆发式增长,使得传统车载网络中常用的CAN、LIN、FlexRay以及MOST总线难以满足车辆智能化、网联化的发展需求,而车载以太网技术能够在提供100Mbps~10Gbps宽带性能同时实现单车30%的线束减重、80%通信连接成本降低使其成为车辆智能化、网联化技术发展的必然选择。在高级辅助驾驶、自动驾驶领域的车载网络中需要采集较多的传感器数据进行融合并用于规划决策,如:摄像头、激光雷达、毫米波雷达、GPS等所感知的数据,如何确保这些传感器采集每帧数据所在时间是否处于同一个时刻尤为重要,而保证传感器采集数据时处于同一个时刻关键在于如何快速精确对车载网络中的众多传感器进行时间同步。 为了查询快速精准时间同步的解决方案,通过拟定关键词“汽车以太网或车载以太网、时间同步或时钟同步”在权威的专利数据库中进行检索,检索结果发现申请人为上海赫千电子科技有限公司申请的已授权发明专利,名称为实时时钟RTC(Real Time Clock)同步调整方法及装置,授权公告号为:CN110138489B, 根据其说明书记载,阐述目前时钟同步gPTP标准协议应用到具体平台的时候,gPTP协议并未对RTC同步过程中的状态进行具体定义,因此在时钟调整过程中,往往很难确认当前RTC的同步状态,在同步跟踪上级时钟时,RTC不能快速同步进入锁定,使得RTC时间一直处于调整和同步过程,然而RTC长期间处于未同步状态,进而导致车载网络中的音视频数据在恢复的时候出现较严重的不同步问题,或多个车载以太网摄像头、激光雷达产生的感知数据因时间不同步导致存在差异,使得根据融合后感知信息进行路径规划或执行某些驾驶行为时,可能出现执行策略错误等问题。因此,赫千科技在其专利中提供一种较优的快速时钟同步调整方案以规避通信网络节点时钟不能快速进行同步的技术问题,以下针对车载网络各节点时间同步的技术要点进行简要阐述。 ■根据gPTP协议的规范,设计符合RTC实时时钟精准同步的多种交互状态。 为了快速精准进行车载网络中各节点的RTC时钟同步,根据HingeTech赫千科技在其专利(CN110138489B)中提供的方案,针对gPTP标准协议规范,自定义了RTC时钟运行的状态,具体包括:自由运行、同步、正常工作跟踪、保持对Master端的跟踪锁,如图1所示。其中,自由运行状态是指Slave端未接收到Master端的报文,即Master端报文丢失,Slave端的时钟依据自己的RTC时间运行;同步运行状态是指上电、唤醒或者Master端的报文从丢失到回复,当大的时间偏差出现时,RTC能够快速同步时间相位,达到时间在相位上的同步。正常工作跟踪运行状态是指时钟在进行时间相位和频率的微步调整;保持对Master端的跟踪锁定运行状态是指Slave端与Master端时钟频率进入锁定。为了使自定义的状态之间实现准确快速转化。具体地,定义四种状态之间进行转化的条件,如:当前为自由状态时,在gPTP消息交互成功后,从自由状态进入同步状态;或者当前状态为正常工作跟踪状态,当出现时间不连续时,从正常工作状态转化为同步状态;当主时钟的gPTP报文丢失后,转化为自由运行状态;或当快速相位和频率微调实现后,进入保持对Master端的锁定。 |