 ###
### ###
###|
车工具 文 | Bear 车工具7月12日,博世本日举行了精准定位方案专家分享会。会上,博世分享了该公司在高精度定位领域的VMPS卫星定位与道路特性定位两年夜解决方案,这两个解决方案互为冗余,可为L3级以上(L一、L2也可用)的主动驾驶汽车提供厘米级的高精度定位服务。 博世VMPS体系可经由过程全世界导航卫星体系对车辆进行定位,并经由过程地面基站与数据处置中间进行定位纠偏,获得的精准定位信息经由过程卫星播送与云端蜂窝通讯的方法及时传输到车辆,从而实现车道级定位,偏差在0.5米之内。 而当车辆驶入地道等卫星旌旗灯号亏弱的地域,博世的道路特性定位服务就可以产生作用,经由过程使用博世第五代毫米波雷达与第三代摄像头,对车道线、限速牌等参考物进行辨认,经由过程算法计较出自身的位置,偏差在10-20厘米之间。 这两年夜技能将会在来岁年中跟着响应车型的面世投入量产,为博世的L2+主动驾驶解决方案提供高精度定位服务。 1、博世三条路径结构主动驾驶 分享会伊始,博世底盘节制体系中国区市场与成长战略总监丰浩先容了博世在主动驾驶技能上的整体结构与落地环境。 他暗示,今朝博世在主动驾驶领域有三条成长路径,划分对应都会街道、高速公路与限制低速区域三年夜场景。
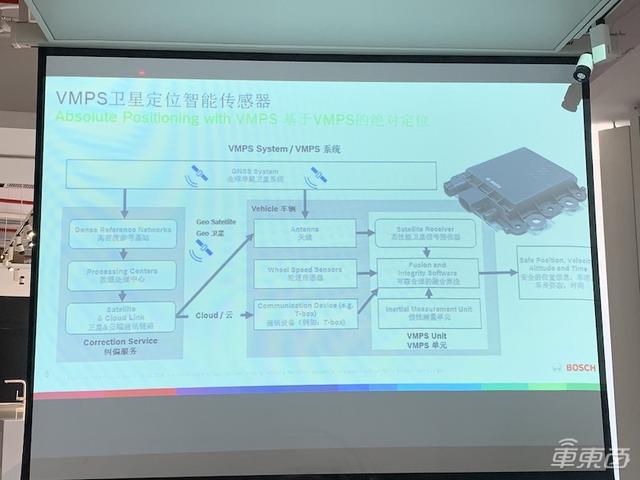
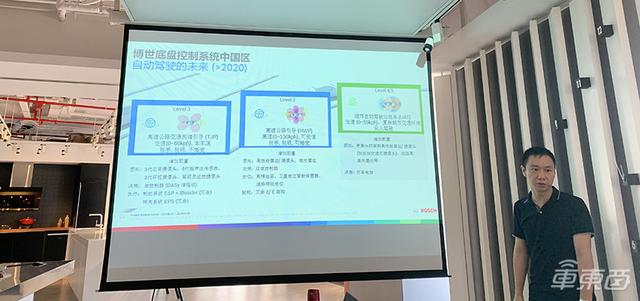
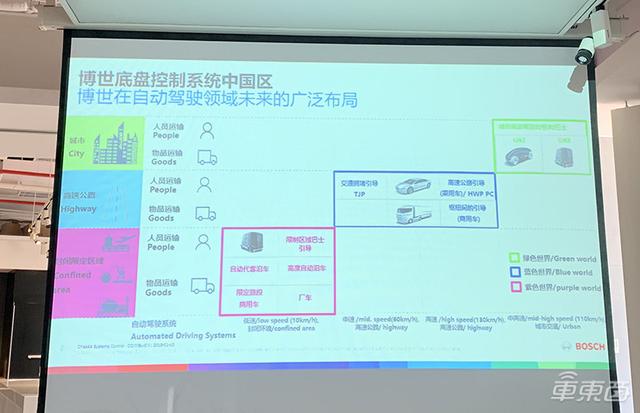
▲博世主动驾驶结构 对应分歧品级的主动驾驶,博世也有着响应的结构。 在L1级ADAS领域,博世从2014年进入中国起头,就与吉祥等主机厂告竣了互助,进行ADAS体系在海内的普及,到今朝为止,设置装备摆设了博世ADAS体系的车型已经经累计跨越了100款。 而在L2级主动驾驶方面,博世也在本年与海内的浩繁车企开展互助,上车数跨越40款。 今朝博世已经经在进行L3级主动驾驶体系的研发,这一品级的主动驾驶体系依然会晤向乘用车,预计会在2022年摆布实现落地。尽管时间点靠后,但丰浩认为,这一落地时间是博世充实斟酌了L3级主动驾驶汽车可能会晤临的各类场景和必要解决的问题以后提出的一个理性的时间点。 对付已经经进入无人驾驶领域的L4级主动驾驶,博世一方面在与戴姆勒开展无人出租车的试运营,另外一方面,则是在测验考试AVP主动代客停车等低速场景下的无人驾驶。 丰浩指出,博世最初对付主动驾驶汽车的研究在单车智能上比力深刻,但比年来鼓起的V2X观点让博世也深受开导,该公司的AVP主动代客停车方案中就融入了场端传感器的运用,车主无需对现有L2级车辆传感器进行进级,便可享遭到主动代客停车服务。 除了此以外,车路协同的观点还让博世对付更多主动驾驶场景有了思虑。丰浩举例说道:“原先车辆行驶在高速公路上,必要在高精度舆图长进行位置简直认,奉告车辆正在高速公路上行驶。但中国的高速公路是有收费站的,若是能哄骗进出收费站的环境来确认车辆的位置,就把繁杂的高精度舆图,酿成了简略的路端确认’0’以及’1’的问题。” 是以,他指出博世也在斟酌进行更普遍的车路协同技能的研发。 在主动驾驶的底层技能上,丰浩向车工具在内的媒体先容了博世的VMPS星基定位与道路特性定位两年夜解决方案,这两年夜解决方案哄骗了博世的车身传感器、卫星导航与惯性传感器三项技能对车辆进行有冗余的精准定位。
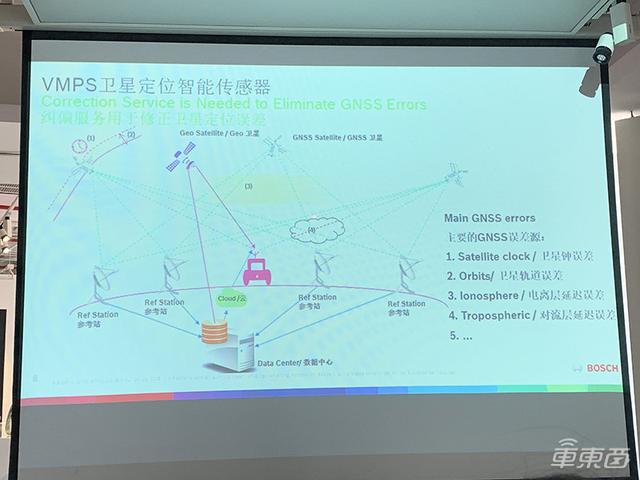
▲博世定位解决方案 不仅如斯,车身传感器所感知到的道路特性信息将会上传到博世物联网云,并与现有的高精度舆图的信息进行比对,从而实现了高精度舆图的及时更新。 在这一层面上,博世对主动驾驶的底层进行了赋能,为博世将来进军高品级主动驾驶摊平了道路。 2、VMPS卫星定位 解决车辆旌旗灯号不稳问题 博世的两年夜定位技能在各自的运用场景与功能上具有互相冗余、互相补足的属性。 博世卫星定位智能传感器的产物司理报告向车工具在内的媒体先容了这一技能的主要原理,即基于全世界导航卫星旌旗灯号以及地球静止轨道卫星播发的纠偏服务旌旗灯号,并交融高机能惯性丈量单位,为主动驾驶车辆提供不乱且精准的定位成效。
▲卫星导航定位纠偏服务 但因为全世界导航卫星位于数万公里的高空之上,此中又有电离层、对流层对旌旗灯号酿成的延耽误差,是以不加处置的卫星导航定位的偏差极年夜,没法知足主动驾驶汽车所必要的车道级定位。 博世将轨道卫星对车辆的定位信息,在地面基站、数据处置中间经由过程算法进行纠偏处置后返回卫星,经由过程卫星播送与云真个蜂窝数据向车辆播送纠偏后的定位信息。 而在车端,经由过程将卫星播送(或者云端传输)的数据与车辆轮速传感器、转向传感器等信息进行连系,患上出更切确的定位信息,这必定位偏差凡是可以节制在0.5米以内,知足车道级定位需求。 而当车辆驶入地道等卫星旌旗灯号亏弱的场景时,车辆的惯性传感器(IMU)仍然可以凭据车辆的速率与转向角度对车辆进行一段旅程的定位。
▲博世VMPS方案示用意 凭据博世在姑苏进行的测试,车辆驶入地道300米后,使用惯性传感器进行的车辆定位仍然可以包管偏差在0.15米摆布,不外跟着行驶间隔的增长,这一偏差将会愈来愈年夜。 除了此以外,报告还暗示,今朝博世所采纳的高精度定位解决方案与传统高精度舆图供给商所采纳的技能逻辑彻底分歧。 传统图商使用的是载波相位差分技能(即经由过程将基准站收集的载波相位发给用户接管机,进行求差解算坐标。Real Time Kinematic,如下简写“RTK”。),必要车辆自动向基站与数据中间哀求位置信息,数据中间经由过程算法创建虚拟基站,并向车辆上的接管机提供虚拟基站对导航卫星的观测值与自身的坐标,从而实现车辆精准定位。这一进程很是依赖蜂窝网络,一旦旌旗灯号欠安,定位极可能会泛起极年夜误差。 而博世使用的是SBAS星基加强体系,经由过程卫星与云端片面向车辆进行播送,并借助基站与数据中间进行纠偏来实现精准定位。这一技能防止了双向通讯,下降了网络时延对定位技能的影响。 3、道路特性辨认解决地道定位 上述的VMPS体系尽管可以或许哄骗卫星导航进行精准的定位,但其存在的短板也很是较着,即面临地道等卫星旌旗灯号弱的场景时,主动驾驶汽车的及时定位难以获得保障。尽管惯性传感器补充了此中的一些不足,但也没法让主动驾驶汽车永劫间在地道中行驶。 在这一方面,博世推出了博世道路特性服务对其进行补足。经由过程辨认道路上的标志物、车道线,与高精度舆图进行比对,从而肯定自身的位置。 博世技能专家刘玉磊暗示,车辆的驾驶情况凡是可以分为静态部门与动态部门,人眼能瞥见的物体,摄像头几近都可以或许捕获到。但不少时辰,一些停滞物掩藏了传感器的部门感知能力,是以,车辆会必要高精度舆图如许的超视距传感器来补充感知上的缺陷。
▲博世技能专家刘玉磊 博世的道路特性辨认就集成在高精度舆图之中,在这一方案中,博世主要依赖于其将在来岁年中推出的第五代毫米波雷达与第三代摄像头来实现。 这二者互为冗余,摄像头会遭到炫光、雨雪、年夜雾等极度情况的影响,而毫米波雷达几近可以全天候运行,不外摄像头却可以显现出及时的画面,为提供了视觉上的数据。 经由过程这一解决方案,博世解决了卫星定位旌旗灯号微弱时,车辆的高精度定位问题,这一方案的偏差在10-20厘米之间。 博世的道路特性服务不单单可以用于主动驾驶汽车的定位,还能介入到高精度舆图的众包收集之中。在海内,博世主要与baidu、高德、四维图新三家高精度舆图供给商告竣了互助。 刘玉磊指出,跟着智能网联汽车的普及,将来搭载博世道路特性辨认传感器的车辆会愈来愈多,传感器也会变患上加倍智能,高精度舆图众包收集的效率将会愈来愈高。 结语:传统Tier1秀出主动驾驶底层技能肌肉 尽管主动驾驶创企在这一领域起头患上更早,但传统Tier1在主动驾驶技能的研发上也进入了周全发力的状况。不管是博世、法雷奥仍是海内的德赛西威,都在从底层发力慢慢攻破主动驾驶难题。 这次博世对外分享两年夜精准定位方案,就是在向外界展现其在主动驾驶底层技能上的雄厚实力。跟着主动驾驶汽车在技能力与普及水平上更进一步,凭仗与主机厂的互助渠道,传统Tier1的实力将会很快呈现出来。 |