|
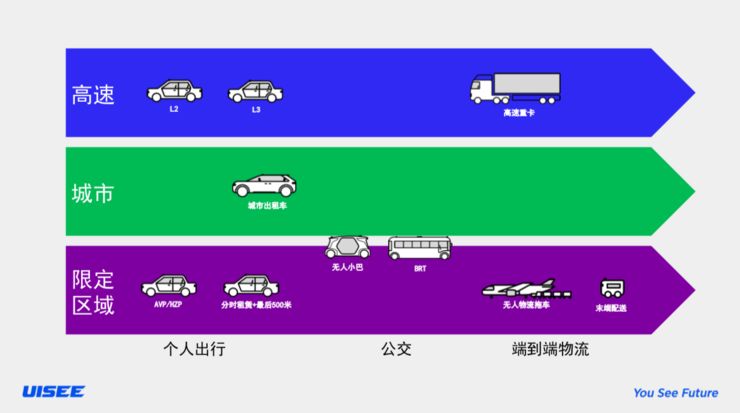
将来三年中,驭势会发生第一个贩卖过5亿的主动驾驶场景。 文 | 胜越 新智驾按:2019 第四届全世界人工智能与机械人峰会(CCF-GAIR 2019)于深圳正式召开。峰会由中国计较机学会(CCF)主理,雷锋网、香港中文年夜学(深圳)承办,深圳市人工智能与机械人研究院协办,获得了深圳市当局的年夜力引导,是海内人工智能以及机械人学术界、产业界及投资界三年夜领域的顶级交流博览嘉会,旨在打造海内人工智能领域极具实力的跨界交流互助平台。 主动驾驶隆冬的说法不竭传出,在驭势科技联合开创人兼CEO吴甘沙的眼中,主动驾驶的炎天还将来,如今更像是处于倒春寒阶段。 “我仍是坚信,2019年到2020年是真正从1到1000起头实现无人驾驶贸易规模化的一年”,吴甘沙提到,今朝主动驾驶正处于从1到1000的进程。若是将主动驾驶比作从0到1000的进程,此中在0到1阶段主动驾驶面对的处境是“杂”,因有不少的场景训练,但其实不知道哪一个场景最佳;而从1到1000要做“专”,行将所有的能量都聚焦在一个点或者者几个点。 成立三年,驭势已经经打造了一款面向多场景、高档此外U-Drive?智能驾驶体系,以车规级智能驾驶域节制器+AI算法+云端智能服务为技能根蒂根基,实现了高速、都会、限制区域的无人公交、端到真个物流等多方落地。迈进2019年,驭势正在抓紧解决主动驾驶规模化量产问题,包含面向乘用车的AVP(主动代客停车)及高速自立L3,及面向商用车的无人物流拖车。
吴甘沙提到,将来两、三年以内,都会中车辆常去的十年夜场景可以实现主动代客停车。将来三年中,驭势无人驾驶将发生第一个贩卖过5亿的场景,抱负的话可能会过10亿。 主动驾驶迈向从1到1000的量产索求阶段 吴甘沙提到一个词——邓宁-克鲁格效应。简略理解即刚入行的人以为甚么都懂,但一到深水区就处处都是问题。反映到主动驾驶行业中:2016年到2018年,主动驾驶可能处于刚入行阶段,无穷的自大;可是比来这两年,年夜家又偏灰心了。在吴看来,这两年主动驾驶玩家不要那末灰心,由于主动驾驶正迈进从1到1000的进程。 但从1到1000,实在比从0到1更难。 吴甘沙进一步诠释,从0到1要做的就是“杂”:主动驾驶可涉略不少的场景训练,但其实不知道哪一个场景最佳。而从1到1000就是要“专”,行将所有的能量都聚焦在一个点或者者几个点上。
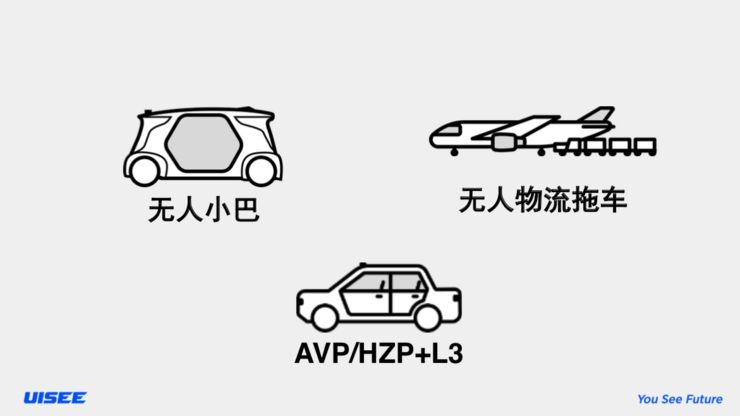
杂事实有多杂?驭势在0到1的阶段中涉猎到不少场景,笼盖高速、都会、限制区域的无人公交、端到真个物流等等。除了少数场景没有涉猎,好比矿山。根本上今朝能看到的无人驾驶运用场景,驭势都有结构。 从1到1000,驭势的3年夜原则、5年夜要求、5年夜事情 迈进主动驾驶1到1000新阶段。吴甘沙提出三年夜原则、五年夜要求、五年夜事情。驭势规划经由过程三年夜原则选择符合的场景。而要在这些场景中实现主动驾驶贸易化,必要制订指标,即“五年夜要求”。为到达这些要求,则要进行五年夜事情。吴甘沙进一步进行领会释: 三个原则,即在选择落地的场景中要合适高频刚需,解决客户的痛点;实现无人,车上取缔平安员;本钱可算三个原则。基于此,驭势对准了无人小巴、无人物流拖车、AVP/HZP+L3,这些都是驭势行将落地的场景。
吴甘沙提到,在这三个场景中,将来三年中,驭势会发生第一个贩卖过5亿的场景,抱负的话可能会过10亿。 五年夜要求:即实现陈规模、多客户、全交付、全无人、不绝服。 陈规模,到本年年末,驭势主动驾驶装机将跨越300台。 多客户,即主动驾驶公司必定要服务多个客户。新智驾领会到,本年海南博鳌亚洲论坛运行了三款无人小巴:第一款是baidu的无人小巴;第二款是驭势与宇通互助的无人小巴;第三款是驭势与一汽互助的无人小巴。两款小巴在形态上、传感器结构、及内涵的底盘机能以及节制协定等层面都分歧。吴甘沙提到,驭势从自有公版的源代码库傍边抽代替码,为某个主机厂去定制优化版本,两个工程师50天便可完成。足以可见,驭势主动驾驶源代码的可通用性。
全交付,与浩繁在公园中运行的小巴分歧,今朝搭载驭势主动驾驶体系的无人小巴,是真正地在都会车流中运营的车辆。且无需驭势工程师,彻底由其互助火伴的自有工程师进行调配。 驭势在2018年与互助火伴上汽通用五菱联合向用户交付了业内首款搭载主动代客停车的宝骏E200(参数|图片),且面向50个种子用户完成交付。其特色是不依赖激光雷达,仅使用摄像头与超声波,这套体系的本钱很是低,最首要的是真正将制品提供应终端用户。从去年11月至今,跨越了7个月时间内,主动代客停车产物零事故。
全无人,即车上没有平安员,真正做到无人。今朝驭势运用于机场主动驾驶车辆已经经运营操纵一年,彻底实现了无人运营。 末了一个即服务不克不及停,主动驾驶车辆要斟酌到恶劣气候,好比台风天、年夜雨、年夜雪,车辆也不克不及遏制运行。 为了知足上述五年夜要求,驭势在暗地里也为主动驾驶制订了五个首要事情: 多维度的平安:一在车辆无网络毗连的环境下,包管平安地自立决议计划;二在路侧端,驭势经由过程RSU提供天主视角来包管平安;三在临近端,当发明车辆处在不正常的环境下,人工可以或许施行长途的干涉干与。在顶层设计中,驭势环抱车端、云端、路侧端、临近干涉干与进行平安摆设。 在路侧单位中,驭势设置装备摆设摄像头以及自有的计较装备。当车辆在拐角时泛起盲区,路侧单位凭仗天主视角奉告车辆泛起在盲区的停滞物。为实现长途的监督以及节制,驭势打造了一套鹰眼体系,在监控室的平安员可以监控8辆车。同时,当平安员看到车辆处于不正常状况下,便可经由过程长途APP对车辆进行干涉干与。
NOME设计:NOME是触及到车辆自己的平安架构设计,包括如下几个条理。在车辆电器架构上、感知定位决议计划体系下,要实现失效平安以及失效可操纵,出格是针对一些特殊的对象、特殊的运营状态,必要有OEDR和长途的监控。吴甘沙提到,这些流程在传统的汽车厂中都有触及,以是科技公司也必需依照一样处所式进行,包含在整车的电子电气架构上实现全数的冗余;在节制器上实现规模化量产。
基于此,驭势自立研发了智能驾驶节制器,可藏在坐椅下面(部门车型),且彻底依照汽车领域的车规级进行研发,而且有第三方机构给驭势发出验证的陈述,在质量系统陈述上经由过程了16949质量经管系统,和关于智能驾驶节制器的认证。 OEDR层面:驭势设计了分歧的物体,比方透明物件、小于20厘米的小停滞物,来包管车辆具有及时监测的能力。当传感器被停滞物影响的时辰,车辆照旧能刹车;当传感器检测到行人走近时,车辆将实时减速;一旦检测到轻细的磕碰即会刹车。 ODD使能:当遇到年夜雨等恶劣气候,车辆传感器,包含激光雷达或者者雷达,和算法要可以或许过滤失落雨珠,容许车辆在情况中事情。 测试系统:驭势笼盖真实测试场以及虚拟仿真测试两年夜层面。在驭势虚拟仿真情况中,其将真正的测试场以及其他运用场景像素级摹拟在一个虚拟的情况中,可以或许缔造分歧的气候以及道路前提。在真正的测试场,驭势一样有年夜量的路测车辆在无人状况下进行24小时测试。 东西链:从传感器、建图、仿真、车辆诊断,驭势已经创建完备的东西链系统。 基于三年夜原则、五年夜要求、五年夜事情,吴甘沙坚信2019年到2020年是真正从1到1000起头实现无人驾驶贸易规模化的一年。 |