北京时间12月9日消息,据AppleInsider网站报道,美国专利商标局周四公开了一项关于基础防撞系统的专利申请,该系统或将成为自动驾驶汽车遥测解决方案的坚实基础。该申请是证明苹果研究无人驾驶汽车的首批文件之一。
苹果的“任意多边形防撞”专利申请证明了该公司正在研究把机器学习和计算机视觉运用到自动“媒介”(汽车)上。 这次被公开的系统和方法专为机器人而设计(无人驾驶汽车就是从这一领域诞生的),其详述了一项基本的防撞技术,该技术能够在预先不知道某个环境里的物体的情况下成功在其中导航。特别地,该系统能够在二维和三维空间里运行,这对于计算机视觉系统来说通常是一项艰难的任务。
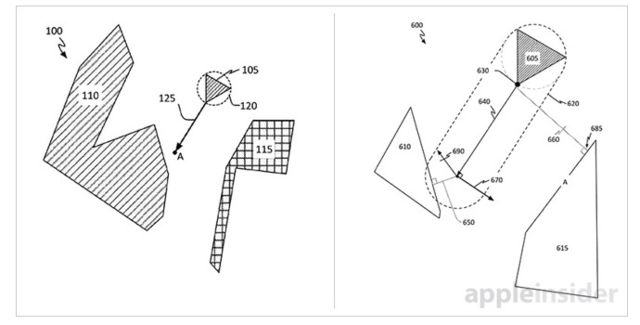
苹果的技术能够避开凸起和凹陷的物体,不管这个物体正在移动还是处于静止状态。该防撞机制还能使用简单的几何原理辨别物体的边缘,由于机器最有可能撞上这些边缘,因此这项机制对于自动驾驶汽车很重要。 自动驾驶汽车经常受预测的时间、或者估计将来的空间定位的能力以及摄像头或者其它感应硬件的操作视野的限制。延伸这两项指标需要先进的光学装备、一个强劲的处理器和复杂的探测和避免碰撞的算法。 苹果的系统通过首先判断目前的位置和基础的运动向量来试图减少计算量。该方法每秒最多能更新汽车的周边环境视图60次,它能够探测多个正在靠近的障碍物,具体地说,它能够探测距离每一个障碍物边缘的距离。该方法通过把边缘距离和已知的边界半径进行比较来决定会否发生碰撞。 在运行时,如果系统判断环境内物体的边缘在其边界半径之外,它将允许汽车沿着原先的轨迹运行。如果系统预测将发生碰撞,它将选择距离汽车当前的位置最近的边缘向量,然后计算避免碰撞所需要的力量。该计算需要考虑汽车的质量、加速和其它关键的测量值。 一旦避开了第一个物体,该系统便移至下一个障碍物,同时会考虑在避开上一个物体的过程中新学得的数据。
最近,苹果公司向国家公路交通安全管理局提出申请,要求政府放宽针对行业新进企业的无人驾驶汽车测试的法规,表明该公司有意在将来进行路面测试 |