|
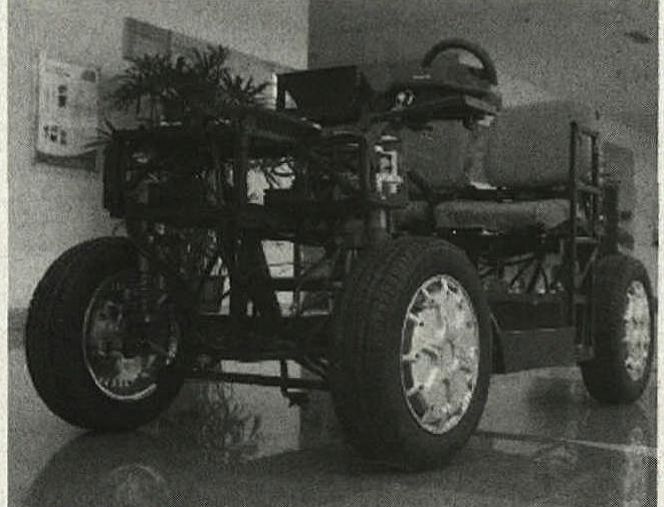
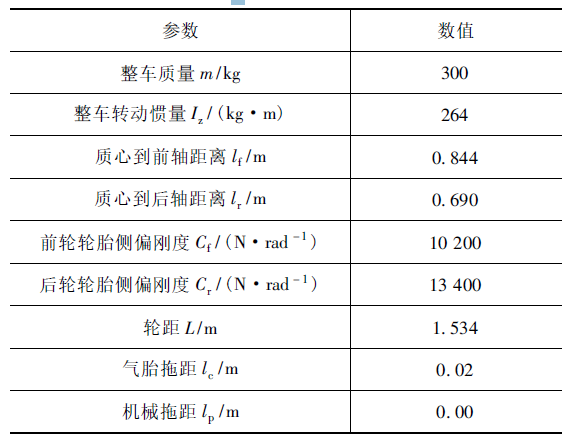
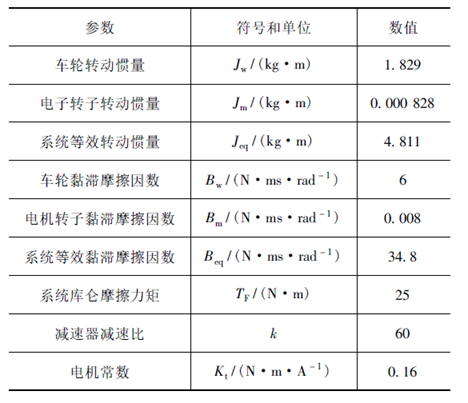
来源:同济智能汽车研究所(电驱动系统研究组) 编者按:本文提出了一种应用于线控转向系统的自适应模糊滑模控制方法,该控制无需预知系统扰动的精确界,并且能降低抖振现象。仿真结果表明,AFSMC 控制下的线控转向系统具有良好的转角跟踪性能、鲁棒性能和能效性能。 本文摘自《汽车工程》,作者为来自同济大学智能汽车研究所的陈辛波教授、罗杰硕士、杭鹏博士等。 摘要:为实现一种新型线控转向系统的转角跟踪性能,提出了一种自适应模糊滑模控制(AFSMC) 方法。传统的滑模控制(SMC)设计需要预先获得系统扰动量,而AFSMC 可通过在线模糊自适应系统实时估计出系统扰动量,进而减弱控制律中的切换项信号,降低了控制系统的保守性和抖振现象。仿真结果表明,AFSMC 控制下的线控转向系统具有良好的转角跟踪性能、鲁棒性和能效。 关键词: 汽车; 线控转向; 滑模控制; 自适应模糊控制 01.前言 相对传统转向系统,线控转向系统主要具有以下优势:取消了转向杆系,提升了车辆的被动安全性;转向电机能实现更大的车轮转角,反馈电机提供了更好的“路感”。 线控转向系统常用PID 控制,但由于转向系统外部扰动和系统不确定性的存在,PID 控制难以满足鲁棒性要求[1 - 3]。因此,简单、鲁棒性好、可靠性高的滑模控制,逐渐被运用于线控转向系统[4 - 6]。然而,传统的滑模控制须预知系统外部扰动,而且容易引入抖振。针对此问题,一些学者提出利用自适应控制、自学习控制和模糊控制等控制理论对系统外部扰动进行估计,取得了一定的降低抖振的效果,但需要人为选定的控制参数比较多[7 - 9]。 本文中提出一种无需预知系统扰动的精确界、并能降低抖振现象的自适应模糊滑模控制方法,并验证了该方法的有效性。 02.新型线控转向系统构型 一种自主研发的基于烛式悬架的线控转向系统如图1 所示,该系统同时集成了悬架系统和驱动系统。上滑柱8 与减速器5 输出轴相连,下滑柱14 与制动盘3 相连并作为转向节。上、下滑柱8 和14 之间通过圆柱副相连,从而实现悬架的跳动。上、下滑柱8 和14 之间的转矩通过上摆臂9 和下摆臂12 传递。转向电机7 产生的转矩经由减速器5、上滑柱8、上摆臂9、下摆臂12 和下滑柱18 最后传至车轮1。转角传感器6 可实时测量转角信号。一款自主研发的装配了该线控转向系统的四轮独立转向电动汽车(4WISEV)如图2 所示,整车参数如表1 所示。
图1 一种新型线控转向系统
图2 四轮独立转向电动汽车 表1 整车参数
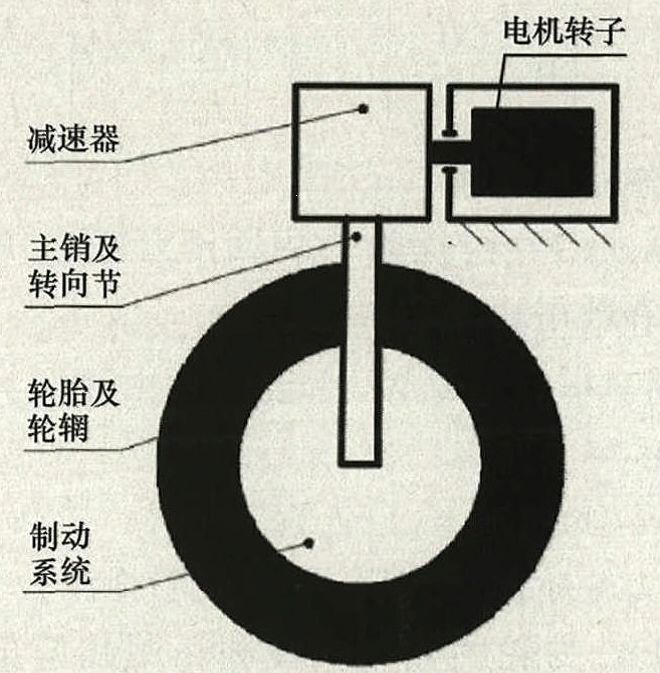
03.系统建模 3. 1 线控转向系统动力学建模 该线控转向系统简化模型如图3 所示。
图3 线控转向系统简化模型 电机转子的动力学方程为
式中:Jm为电机转子转动惯量;δm为电机转子转动角;Bm为电机黏滞摩擦因数;Tw2m为车轮作用在转向电机上的转矩;Tm为电机产生的转矩;Tctr为控制转矩;ΔTpert为电机扰动。 式中:Jw为车轮转动惯量;δw为车轮转动角度;Bw为车轮黏滞摩擦因数;TF为库仑摩擦力矩;Te为回正力矩;Tm2w为转向电机给车轮的转矩。 k 为减速器的减速比,可得
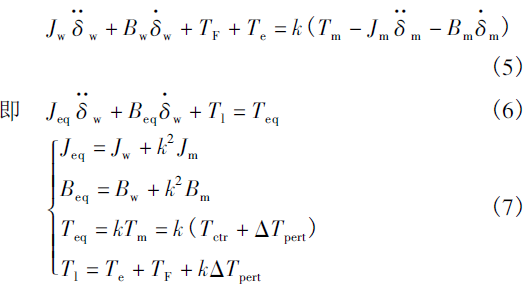
根据式(1)、式(3)和式(4),可得到线控转向系统的动力学方程:
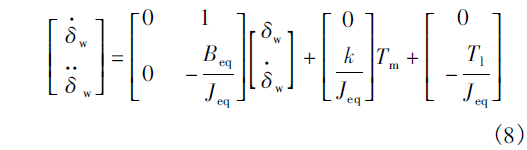
式中:Jeq为系统等效转动惯量;Beq为系统等效黏滞摩擦因数;Teq为作用在系统上的等效转矩;T1为总扰动转矩。 结合式(6)和式(7),线控转向系统动力学方程可表示为状态空间形式:
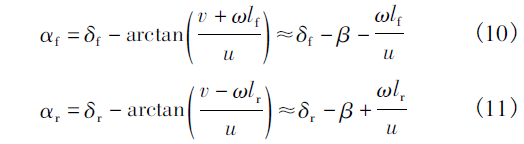
3. 2 系统扰动分析 根据式(7),总扰动Tl由回正力矩Te、库仑摩擦力矩TF和电机扰动ΔTpert组成。 针对具体悬架结构,主要考虑由侧向力引起的回正力矩: 式中:lc为轮胎机械拖距;lp为气胎拖距;Fyi为侧向力;Ci和αi为轮胎侧偏刚度和轮胎侧偏角;下标i表示前轮(f)或者后轮(r)。当车辆质心侧偏角很小和侧向速度v 变化缓慢时,有
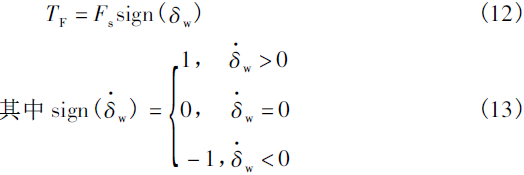
式中:lf为质心到前轴距离;lr为质心到后轴距离;ω为横摆角速度。 库仑摩擦力矩TF为:
式中:Fs为库仑摩擦常数。 转向电机为无刷直流(BLDC)电机,其输出转矩与相电流成正比[10],可简化为 式中:Kt为电机常数;I为相电流。电机输出扰动可等效为Kt和I的扰动,式(14)可表示为
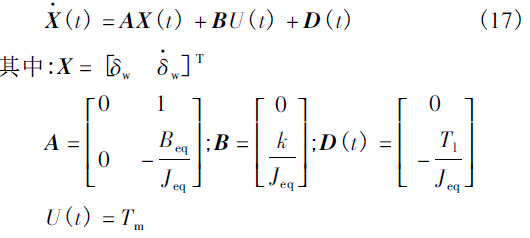
式中ΔKt和ΔI分别为Kt和I的扰动量。故电机扰动可表示为 总扰动Tl仅在仿真中作为验证控制器鲁棒性的外界输入,而不作为控制器的输入。 4.自适应模糊滑模控制器设计 4. 1 传统滑模控制器设计 基于系统动力学模型,本节中先给出传统滑模控制器的求解过程。式(8)可表示为
式中D(t)为扰动矩阵。 转角跟踪误差为 式中
,δref为参考转角。 滑动参数定义为: 式中
。可得
控制律U由等效控制项Ueq和切换项Us构成:
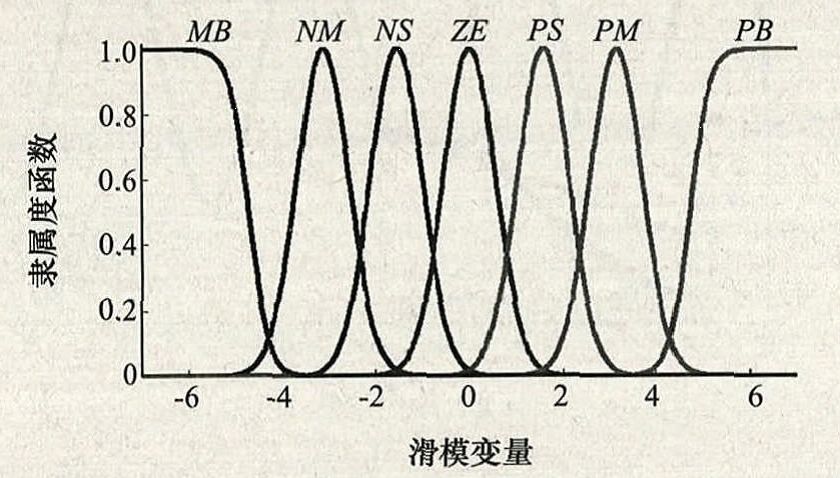
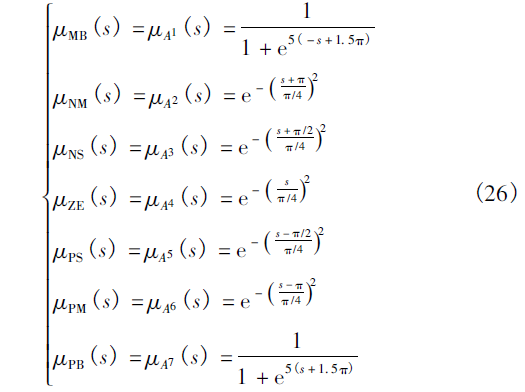
式中η为切换常数,η>0。 滑动阶段,即s =0 时,利用等效控制项Ueq可保证系统动态在滑动面上滑动。Ueq可以通过方程求解。到达阶段,即s≠0时,通过合理设计切换项Us,使系统满足式(23) 滑动条件,从而使系统动态能趋近于并最终停留在滑模面s = 0 上[11] 将式(22)代入式(20),可得 取时,式(22)滑动条件成立。 为获得传统滑模控制的控制律,需要先确定切换常数η。根据式(25),当KD较大时,要求选取较大的,这将导致严重的抖振,而且使系统保守性过大。为了减小抖振和降低系统保守性,应使切换项在保证鲁棒性的前提下尽量小。然而,KD中包含扰动项D,其精确界难以获得。 4. 2 自适应模糊滑模控制器设计 传统的滑模控制需预知系统扰动的精确界,本节将利用一个模糊系统对系统扰动进行估计。该模糊系统的输入为滑动参数s,输出为ηsgn(s)的估计值。根据隶属度函数的设计程序[12],设计了合适的隶属度函数,如图4 所示。
图4 s的隶属度函数
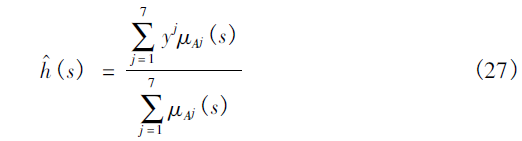
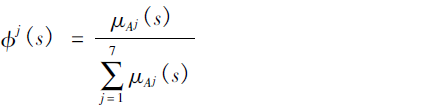
模糊系统输出为
式中:μAj(s)为s 的隶属度函数;yj为隶属度函数取得最大值时所对应的ηsgn(s)的值,其值可通过自适应律实时调节。 引入模糊基向量Φ(s),式(27)可表示为 其中:
θh通过自适应律确定: 式中γ为自适应参数,且γ>0。 用替换式(21)ηsgn(s)中,得 此时,滑动条件为 4. 3 渐进收敛性分析 定理1:针对式(17)系统,若运用式(30) 控制律,其中由式(27) 给定,θh由式(29) 给定,那么,此闭环系统有界,而且其跟踪误差渐进收敛于0。 证明:设θh的最优参数为 式中Ωh为θh的集合。可以表示为 式中ε为模糊系统的估计误差,。 将式(33)代入式(24),得
其中:,且 选取李雅普诺夫方程为
微分可得
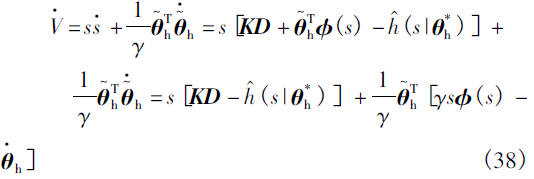
将式(34)代入式(37),可得
将式(33)和式(35)代入式(38),可得 取,为估计误差上界,则 当时,由拉塞尔不变性原理可得,当时间时,。 5.仿真与结果 为验证AFSMC 控制器的性能,设计了一个工程中常用的PID 控制器。该PID 控制器的负反馈信号为转角跟踪误差,其参数通过粒子群法( PSO) 寻优获得:kP= 297,kI= 21 和kD= 102,kP,kI和kD分别为比例、积分和微分增益,闭环系统内部稳定。 整车参数和线控转向系统参数见表1 和表2,电机的最大转矩为,电机常数和相电流的摄动各设为5%,自适应参数γ=1.5,仿真采样时间为0. 001s。 表2 线控转向系统参数
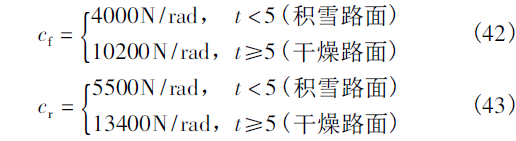
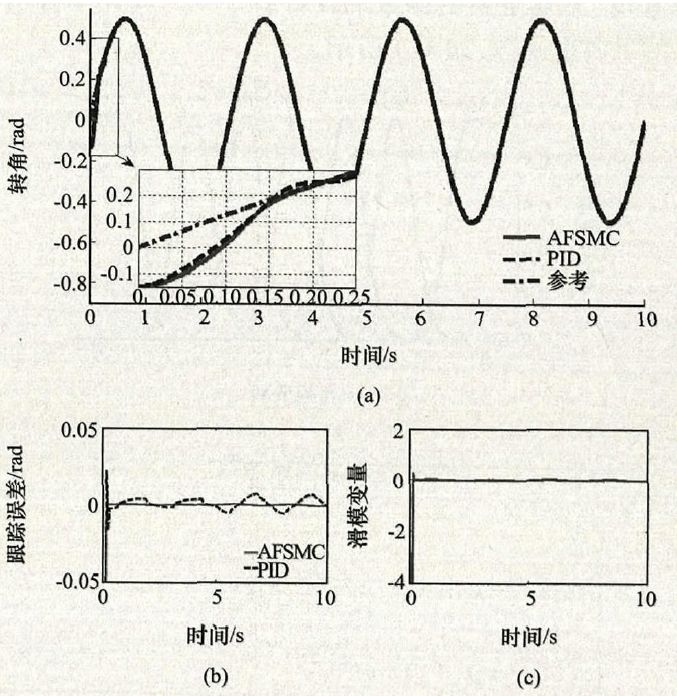
5. 1 正弦参考信号输入仿真 为验证AFSMC 的跟踪性能、鲁棒性能和能效性能,给定前轮转角的参考转角信号为: 后轮转角信号始终为0,初始前轮转角为-0. 15rad。假设前后车轮侧偏刚度时变:
转角跟踪性能如图5(a)所示,相对传统的PI控制,AFSMC无超调量、响应更快。从图5(b)可以看出,AFSMC的跟踪误差更小。从图5 (c)可以看出,滑模变量在0. 16s时稳定在了0附近,说明AFSMC能使滑模变量快速收敛。总扰动如图5(d) 所示。从图5(e)可以看出,一直大于sKD,即仿真过程中式(31)滑动条件一直成立。从图5( f) 可以看出,AFSMC 所需控制力矩更小,降低了对转向电机峰值转矩的要求,同时AFSMC 较好地抑制了抖振问题。从图5( g) 可以看出,AFSMC 所需的控制功率更小,有利于整车的能效。
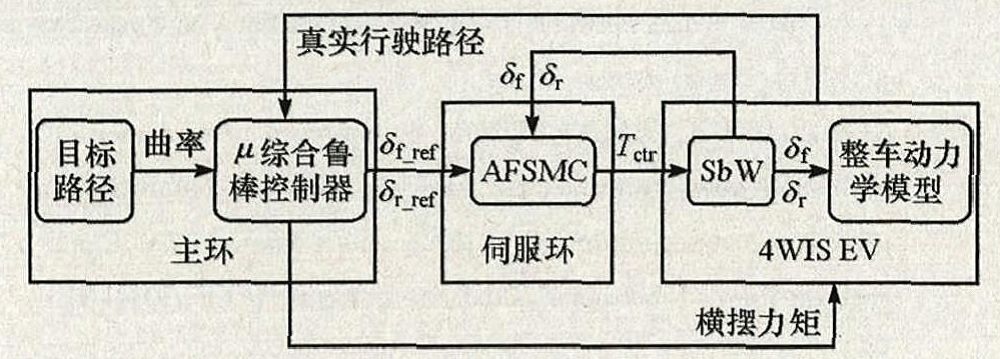
图5 正弦参考信号输入仿真结果 5. 2 单变道/双变道仿真 为实现前文所述4WIS EV的路径跟踪能力,开发了一套以μ综合鲁棒控制为主环、AFSMC为伺服环的整车控制策略,具体结构如图6所示。首先将目标路径的曲率输入给μ综合鲁棒控制器,之后μ综合鲁棒控制器计算出前轮和后轮的参考转角,再将参考转角输入给AFSMC控制器进行跟踪,最后将整车状态和各转向系统状态进行反馈。受限于文章篇幅,4WIS EV建模和μ综合鲁棒控制器求解过程不再详述。
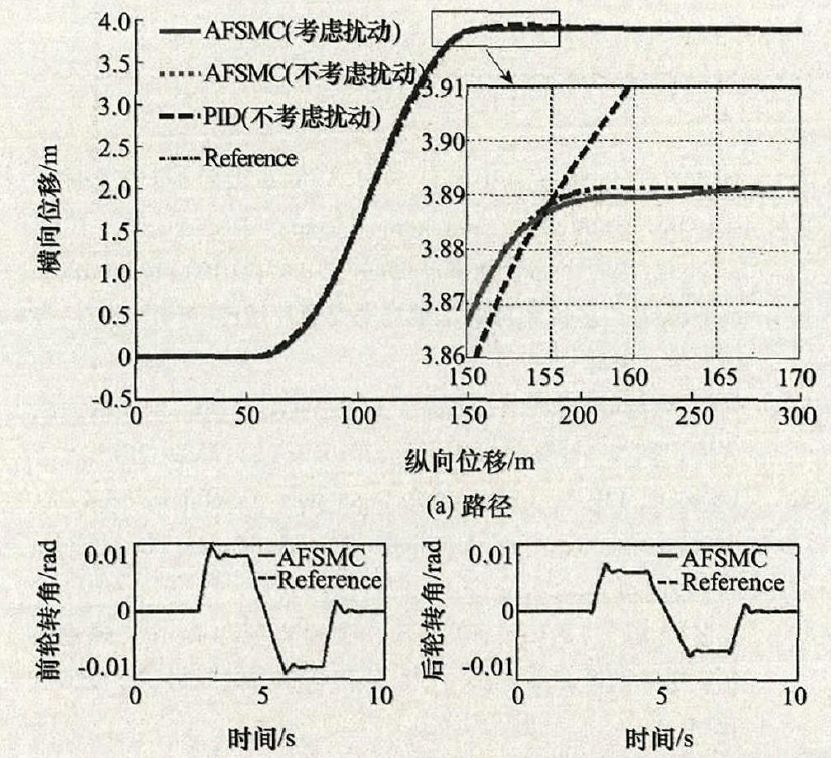
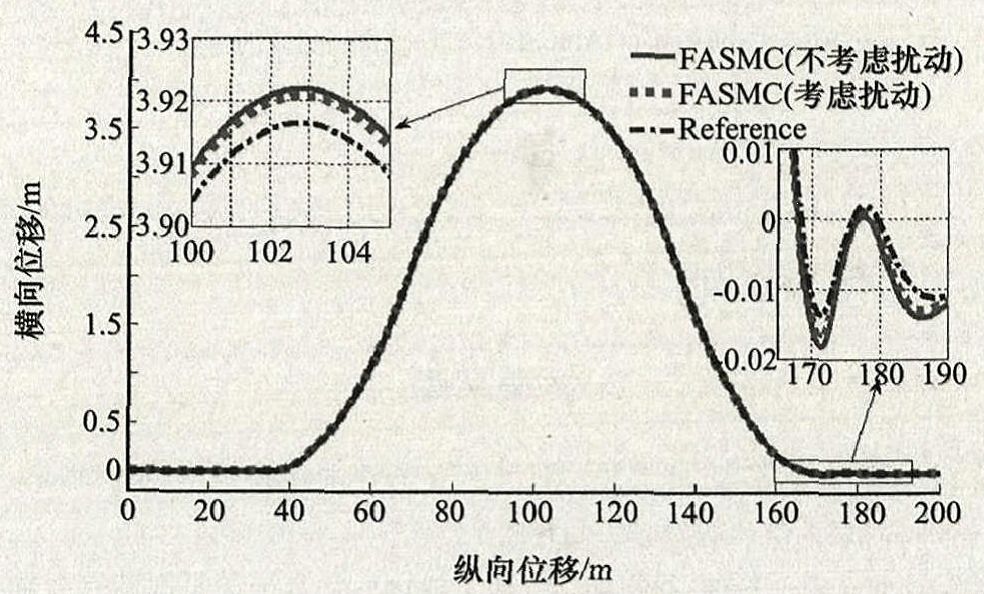
图6 4WIS EV 整车控制策略 为验证结合AFSMC的整车控制策略的路径跟踪性能,进行了单变道仿真,车速为20m/s,结果如图7 所示。
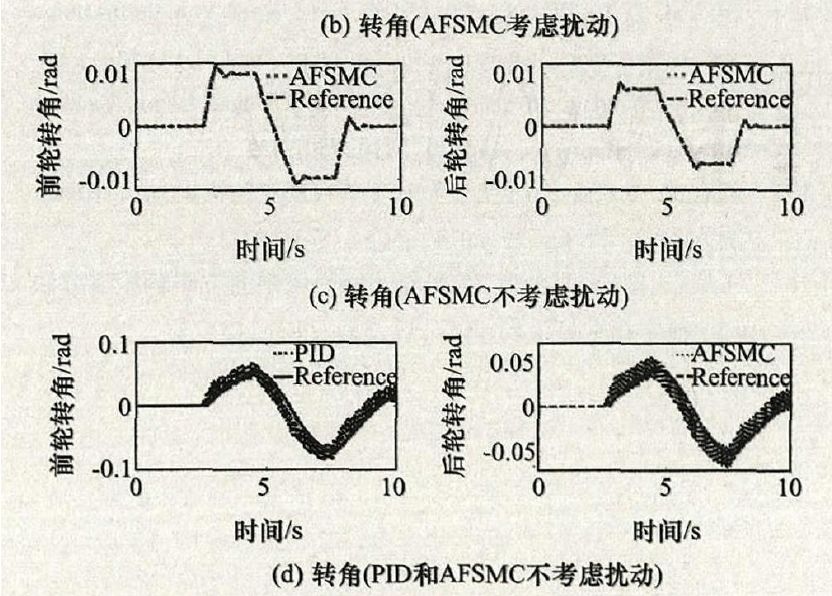
图7 单变道工况仿真结果 图7(a)说明在不考虑扰动时,结合AFSMC的整车控制策略和结合PID控制的整车控制策略都能较好跟踪目标路径。考虑扰动时,结合AFSMC的整车控制策略能较好地跟踪目标路径,而结合PID控制的整车控制策略出现了失稳现象,因而图中未给出。图5(b)和图5( c) 说明了不管考虑扰动与否,AFSMC都能很好地跟踪目标转角。图5 (d)说明PID控制出现了强烈振荡,因此所述PID控制器不适合在实际场合中使用。 为进一步验证结合AFSMC的整车控制策略的路径跟踪性能,进行了双变道仿真,车速为25m/s,结果如图8所示。图(8)说明了不管考虑干扰与否,结合了AFSMC的整车控制器都能较好地实现路径跟踪,同时可以看出干扰对路径跟踪性能影响很小。
图8 双变道工况仿真结果 6.结论 本文中首先提出了一种创新的线控转向系统构型,进而提出针对此线控转向系统的自适应模糊滑模控制,该控制具有无需预知系统扰动精确界和能降低抖振现象的特征。正弦参考信号输入的仿真结果显示,AFSMC控制下的线控转向系统具有良好的转角跟踪性能、鲁棒性能和能效性能。为验证AFSMC在整车控制策略中的性能,针对所述的4WIS EV设计了一套以μ综合鲁棒控制为主环、AFSMC 为伺服环的整车控制策略。单变道和双变道工况的仿真结果显示,不管考虑扰动与否,作为整车控制策略的伺服环,AFSMC较好地完成了目标转角的跟踪,进而实现了整车的路径跟踪。 参考文献 [1]余颖弘,王保华. 汽车线控转向实验台转向驱动系统的辨识及其PID 控制[J]. 湖北汽车工业学院学报,2016,30(2):1 - 4. [2]李珊,谭光兴,林川. 基于模糊PID 线控转向系统前轮转角控制[J]. 广西科技大学学报,2012,23(3):56- 60. [3]FU X,LIF,FENG K. Research of automotive steer-by-wire control based on integral partition PID control[C]. Third International Conference on Genetic and Evolutionary Computing,Wgec 2009,Guilin,China,14 - 17 October. DBLP,2009:561- 564. [4]韩坤,任春燕. 基于滑模控制的线控转向系统仿真[J]. 湖北汽车工业学院学报,2013,27(3):1 - 4. [5]郑凯锋,陈思忠,王亚. 基于线控技术的四轮转向全滑模控制[J].东南大学学报(自然科学版),2013,43(2):334 - 339. [6]WANG H,KONGH,MAN Z. Sliding mode controlfor steer-bywire systems with AC motors in road vehicles[J]. IEEE Transactions on Industrial Electronics,2014,61(3):1596 - 1611. [7]KAZEMI R,JANBAKHSHA A. Nonlinear adaptive sliding mode control forvehicle handling improvement via steer-by-wire[J]. International Journal of Automotive Technology,2010,11(3):345 -354. [8]DO M T,MANZ,ZHANG C,et al. Robust sliding mode-based learning control for steer-by-wire systemsin modern vehicles[J].VehicularTechnology IEEE Transactions,2014,63(2):580 - 590. [9]LIN F J,HUNGY C,RUAN K C. An intelligentsecond-order sliding-mode control for an electric power steering system using awavelet fuzzy neural network[J]. IEEE Transactions on Fuzzy Systems,2014,22(6):1598 - 1611. [10]REDDYC S R,KALAVATHI M S. Improved performance of a novel SMC-fuzzy controller for DTC brushless DC motor drivefor precise speed regulation[C]. IEEE Ninth International Conference on Power Electronics and DriveSystems. IEEE,2011:873 -880. [11]WANGJ,RAD A B,CHAN P T.Indirect adaptive fuzzy sliding mode control: part I: fuzzy switching[J]. Fuzzy Sets &Systems,2001,122(1):21 - 30. [12]黄卫华,方康玲,章政. 典型模糊控制器的隶属函数设计及分析[J]. 模糊系统与数学,2010,24(5):83- 90. 来源:同济智能汽车研究所(电驱动系统研究组) |